Project Index
2025 Projects
2024 Projects
2023 Projects
2025 Projects
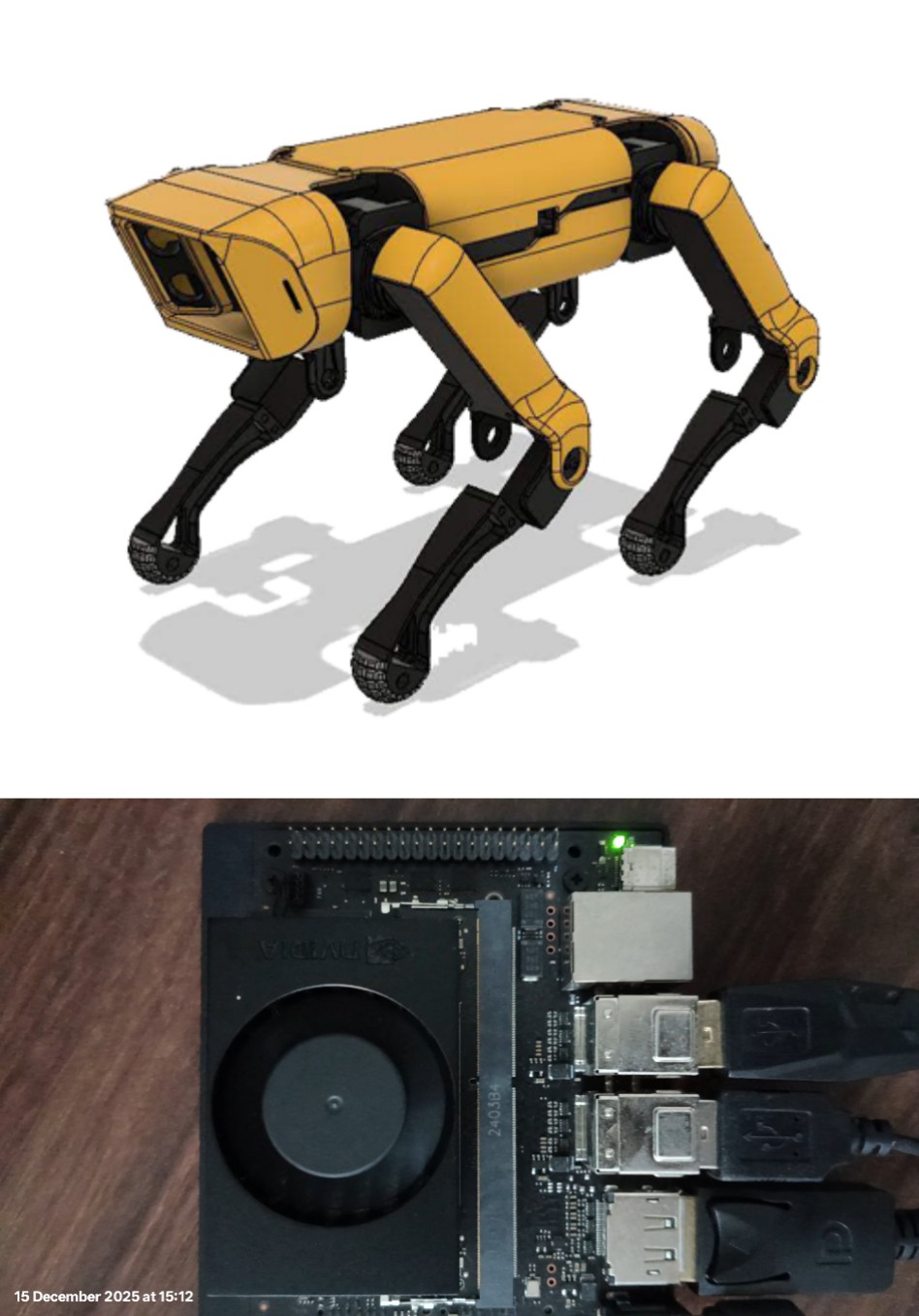
Smart Guard Robot
2025 | Mini Project (ECD334) - Upcoming
An innovative multi-functional four-legged robot built on the Nvidia Jetson Nano platform, designed to serve three critical roles: mobile security sentinel, personal companion, and interactive educational tutor. This project demonstrates the integration of advanced ML, computer vision, and conversational AI on a single mobile platform.
Project Team:
- Adwaith Krishna R
- Agesh K
- Aravind A S
- Devanarayanan K M
Key Features:
- Mobile Security Surveillance: Real-time threat detection using ML-based object detection and anomaly recognition
- Advanced Computer Vision: HD camera integration for continuous environmental scanning and live video streaming
- Autonomous Navigation: Four-legged mobility system with complex kinematics for superior movement
- Conversational AI: Natural language interaction with Speech-to-Text (STT), NLP, and Text-to-Speech (TTS)
- Educational Tutor Mode: Interactive learning sessions with domain-specific knowledge (science, history, etc.)
- Active Threat Response: Verbal warnings, target tracking, and real-time alerts to users
Technical Implementation:
Technologies Used:
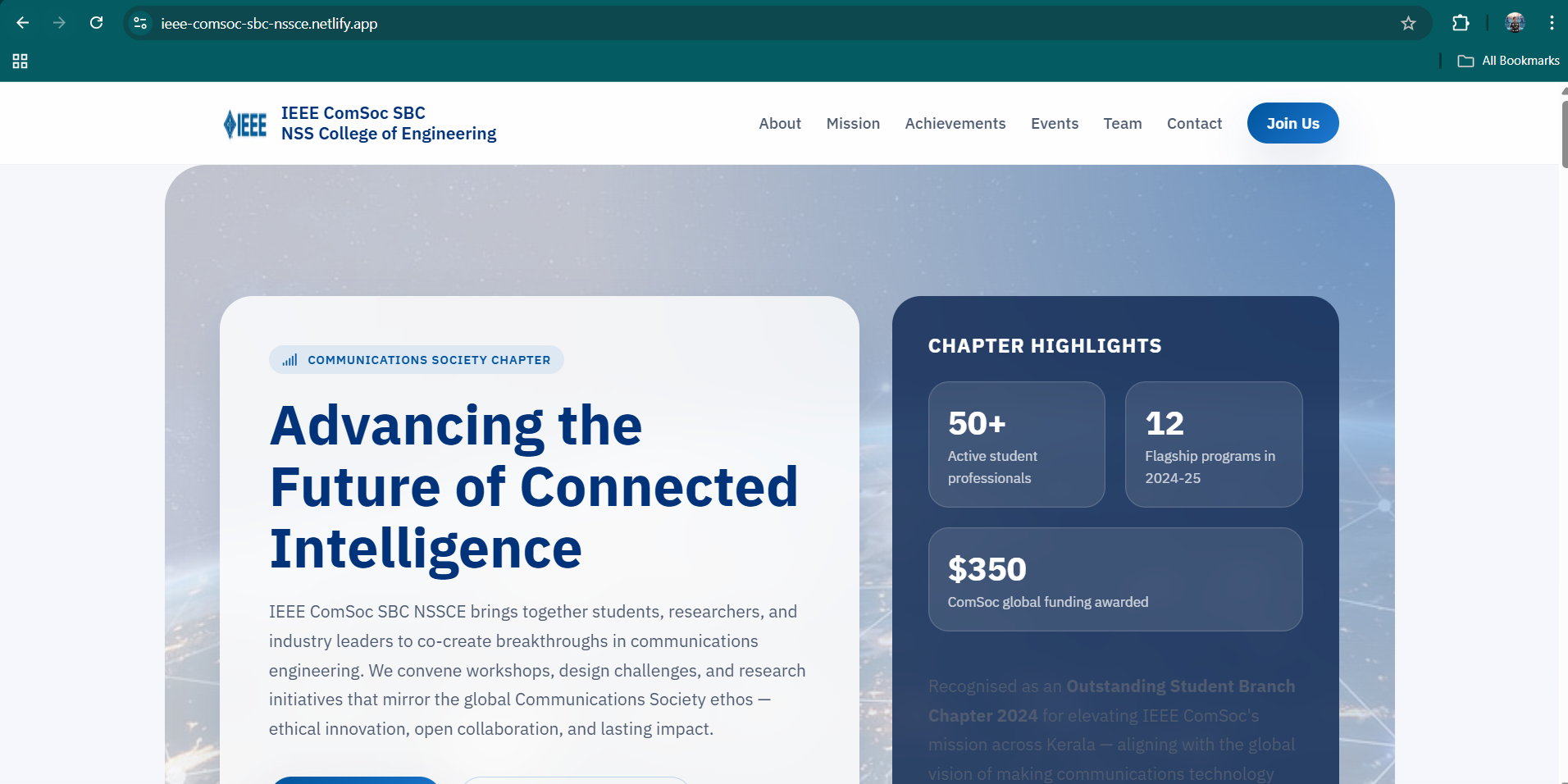
IEEE ComSoc SBC NSSCE Website
2025 | Completed
Designed and developed the official website for the IEEE Communications Society (ComSoc) Student Branch Chapter at NSS College of Engineering. The site serves as a central hub for student members, researchers, and industry leaders to find information on events, achievements, and team members.
Key Features:
- Responsive design for mobile and desktop
- Sections for Mission, Achievements, Events, and Team
- Integrated "Join Us" and contact functionalities
- Deployed on Netlify for fast, global access
Technologies Used:
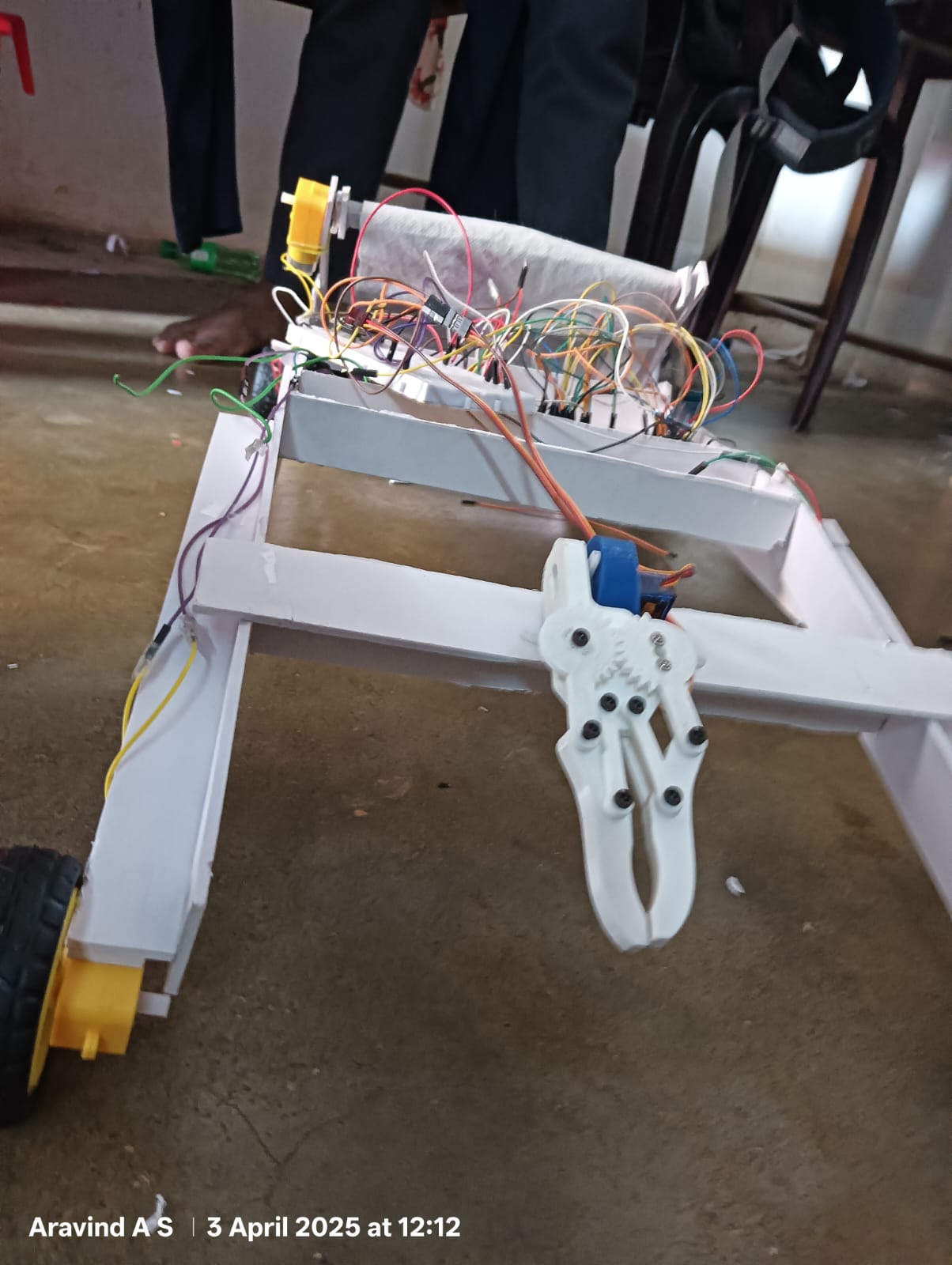
Multi-purpose River Cleaning Rover
2025 | Completed
A custom-designed rover equipped with a conveyor belt for river waste collection and a 2-DOF robotic arm for object pick-and-place operations. The system integrates ultrasonic sensors for obstacle detection and wireless control for remote operation.
Key Features:
- Conveyor belt mechanism for continuous waste collection
- 2-DOF robotic arm with precise object manipulation
- Ultrasonic sensors for obstacle detection and avoidance
- Wireless control via custom remote interface
Technologies Used:

6-DOF Robotic Arm with Hand Gesture Control
2025 | Completed
An innovative robotic arm control system that uses computer vision and hand gesture recognition to enable intuitive human-robot interaction. The system tracks hand movements in real-time and translates them into precise robotic arm movements.
Key Features:
- Real-time hand gesture recognition
- Six degrees of freedom for complex movements
- OpenCV-based computer vision processing
- Arduino-based robotic arm control
- Seamless gesture-to-movement translation
Technical Implementation:
Technologies Used:


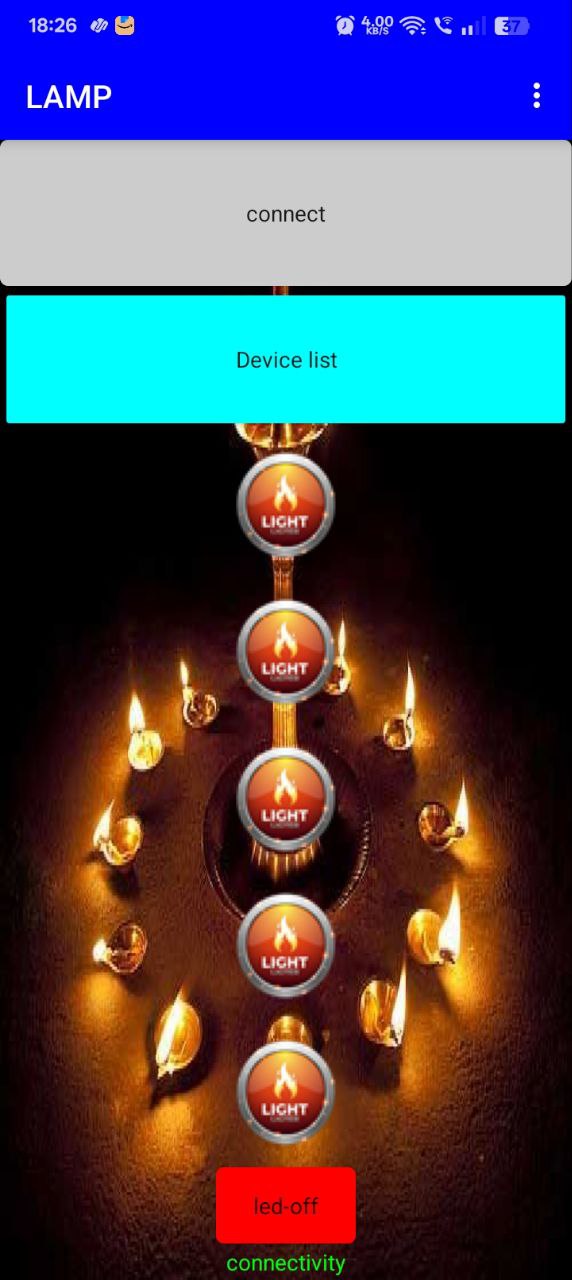
Automatic Vilakku (Bluetooth-Controlled Lamp)
2025 | Completed
This project automates a traditional Indian 'vilakku' (lamp) using an Arduino microcontroller and a custom Android app. Developed for the IEEE CS Society SB NSSCE's 'Encrypta' coding competition, it allows the lamp to be controlled remotely via Bluetooth. As a member of the technical team, I designed and implemented the hardware and software components of this unique home automation system.
Key Features:
- Arduino-based control system for reliable operation
- Bluetooth connectivity for wireless remote control
- Custom Android app built with MIT App Inventor
- Relay module for safe and effective power switching
Technical Implementation:
Technologies Used:
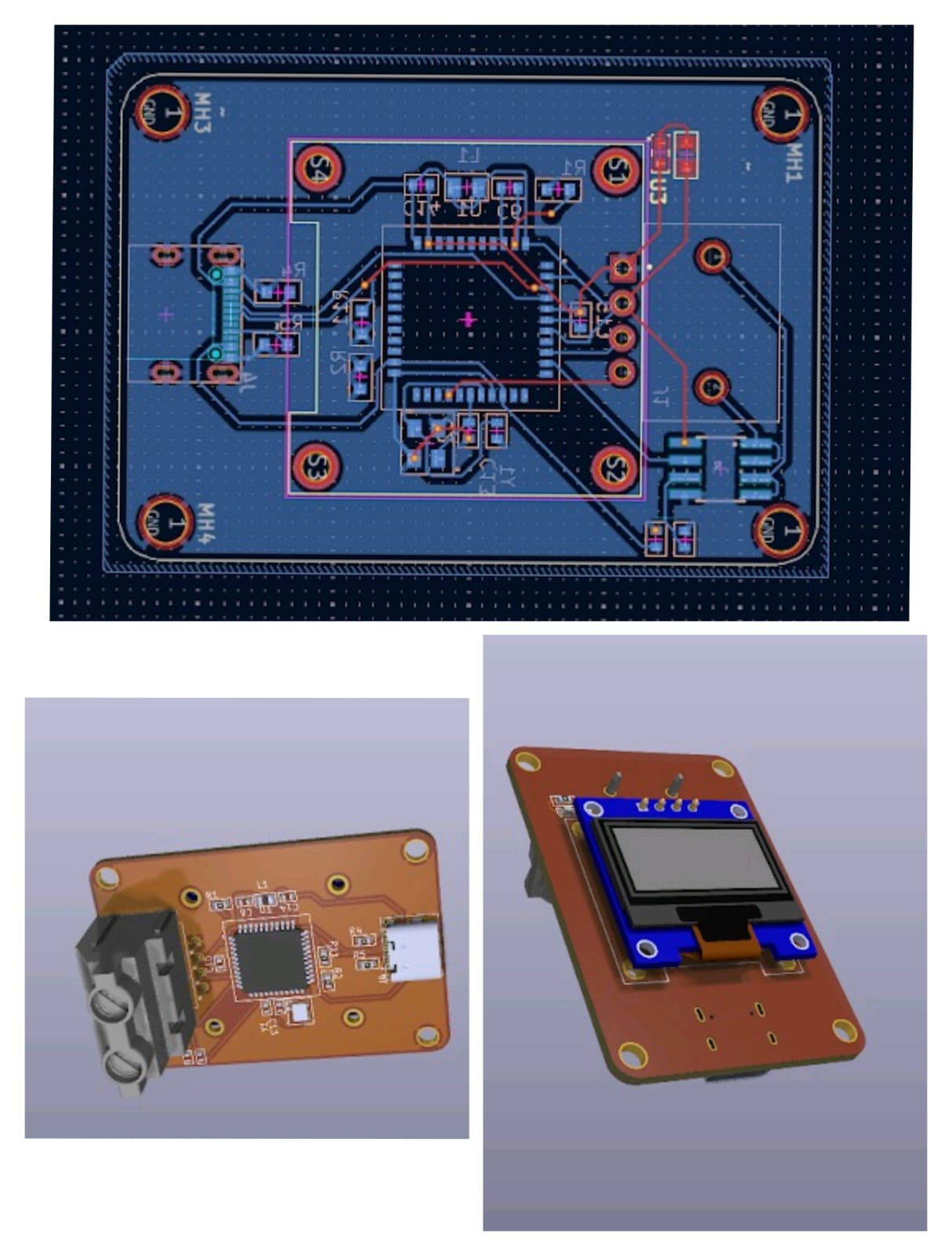
Smart Energy Monitor & KSEB Tariff Calculator
2025 | Completed
A custom embedded system designed to monitor real-time electrical current consumption and calculate energy costs based on Kerala State Electricity Board (KSEB) tariff slabs. The device measures AC mains current, calculates power, and estimates the running bill using a telescopic billing algorithm.
Key Features:
- Real-time RMS Current & Power Calculation
- KSEB Tariff Engine: Auto-calculates bill based on unit slabs
- 0.96" OLED Display for live monitoring
- Custom PCB with ATmega32U4 & ACS712
- USB-C Power & Data Interface
Technical Implementation:
Technologies Used:
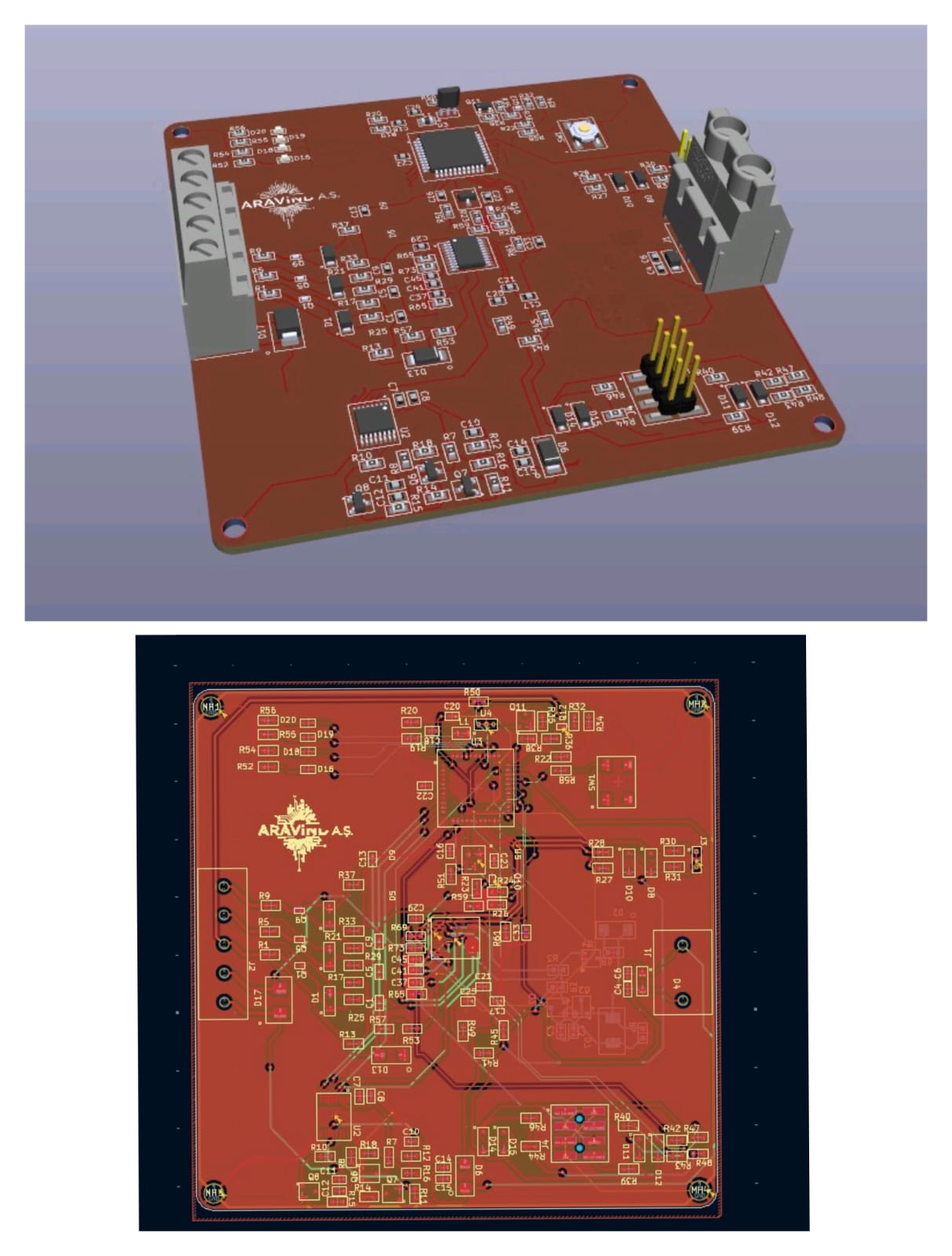
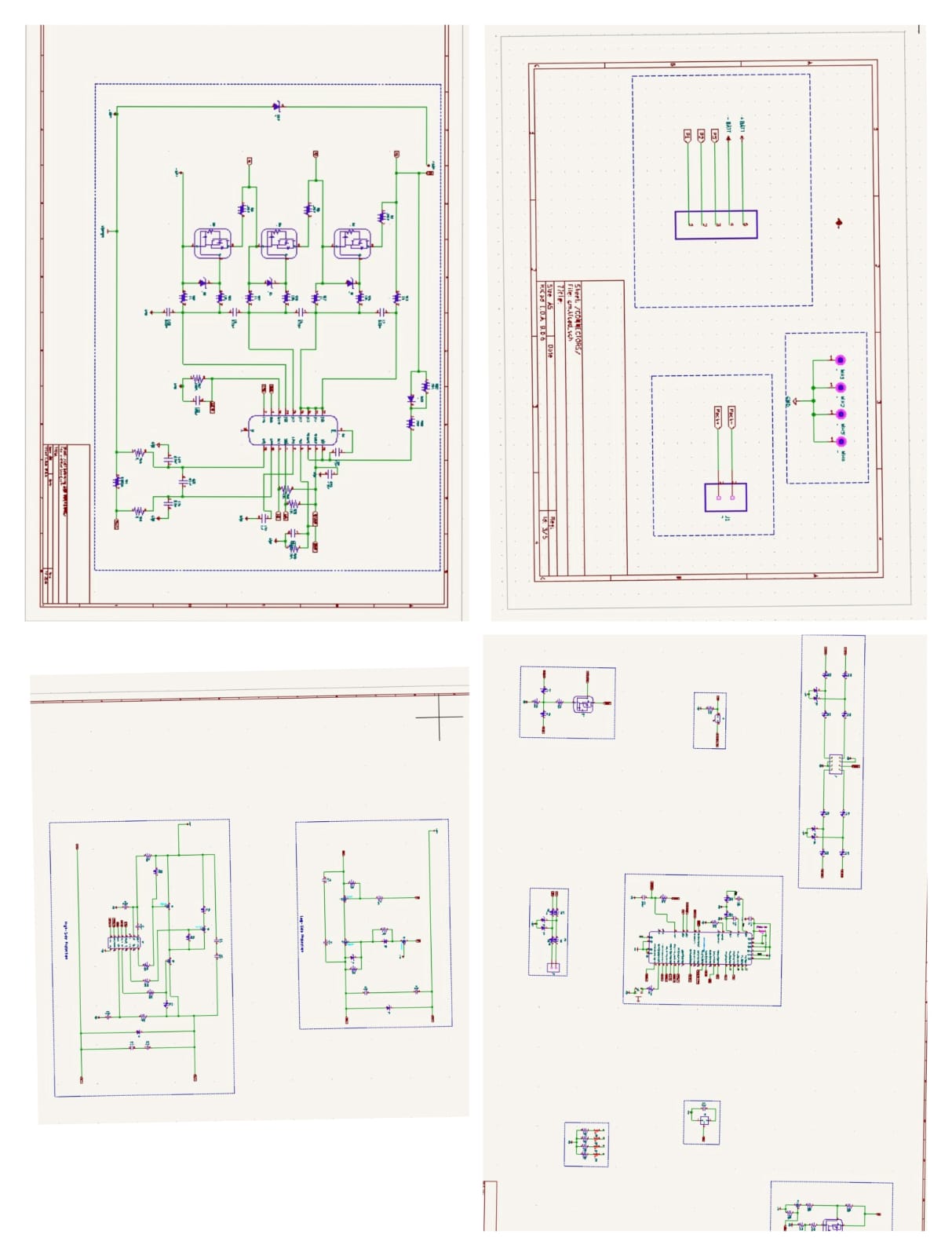
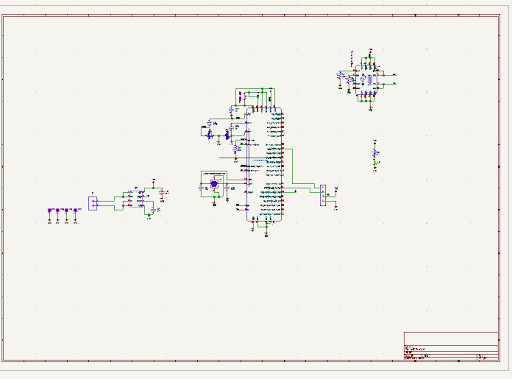
CubeSat Battery Management System (EPS)
2025 | Research & Development
A high-reliability Battery Management System (BMS) designed for the Electrical Power System (EPS) of a CubeSat. This project integrates the Texas Instruments BQ76920 Analog Front End with an ATmega32U4 microcontroller to ensure the safety and longevity of Li-Ion battery packs in a space environment.
Key Features:
- Space-Grade Protection: Over-charge, Over-discharge, and Short-circuit protection via BQ76920.
- Configurable Topology: Unique PCB design supporting both High-Side (P-FET) and Low-Side (N-FET) switching paths.
- Active Cell Balancing: Ensures uniform voltage across cells during charging.
- I2C Communication: ATmega32U4 reads telemetry (Voltage, Current, Temp) and manages safety overrides.
Technical Implementation:
Technologies Used:
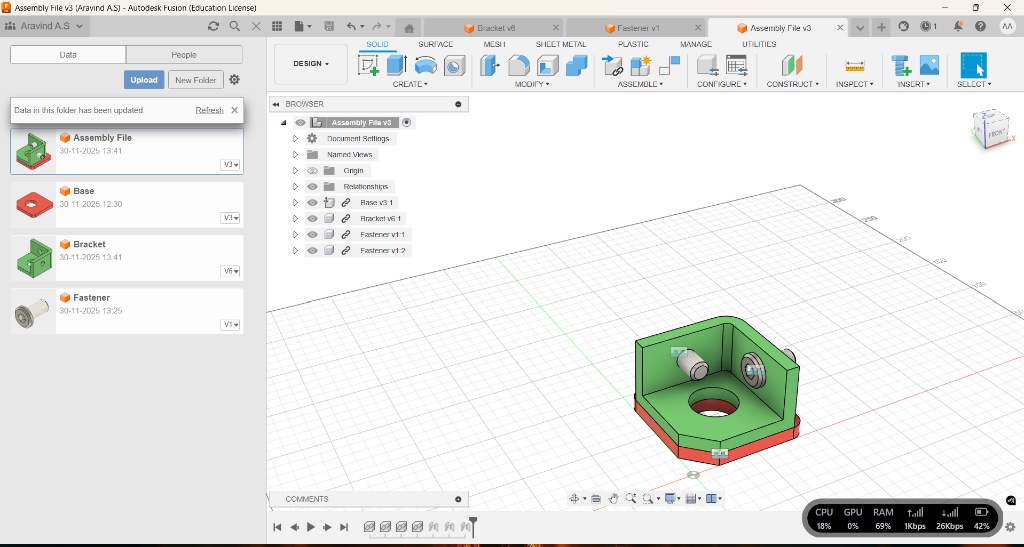
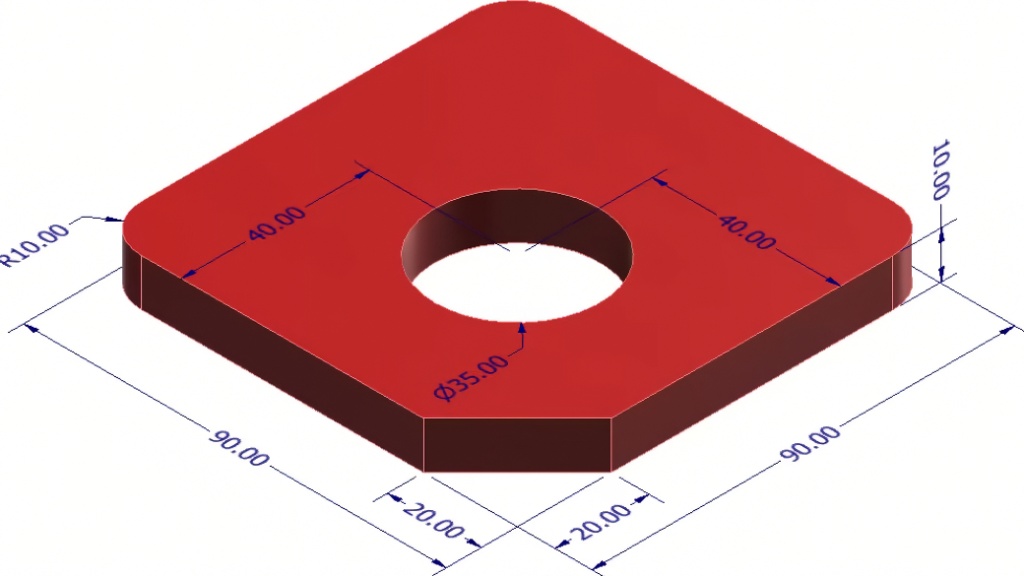
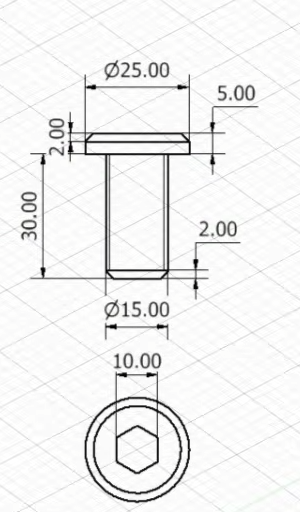
Mechanical Assembly Design (Fusion 360)
2025 | Skill Development
This project marks my entry into professional Computer-Aided Design (CAD) using Autodesk Fusion 360. I designed a multi-component mechanical assembly consisting of a base plate, an L-bracket, and custom fasteners.
The project involved the entire design lifecycle: creating 2D sketches with parametric constraints, extruding 3D bodies, applying chamfers/fillets, and defining rigid joints for the final assembly.
Key Skills Demonstrated:
- Parametric Sketching: Defined dimensions for the 90x90mm Base and Bracket.
- 3D Modeling: Created custom 15mm fasteners with hex sockets.
- Assembly Joints: Aligned and assembled components virtually.
- Technical Documentation: Generated engineering drawings with precise dimensioning.
Technologies Used:
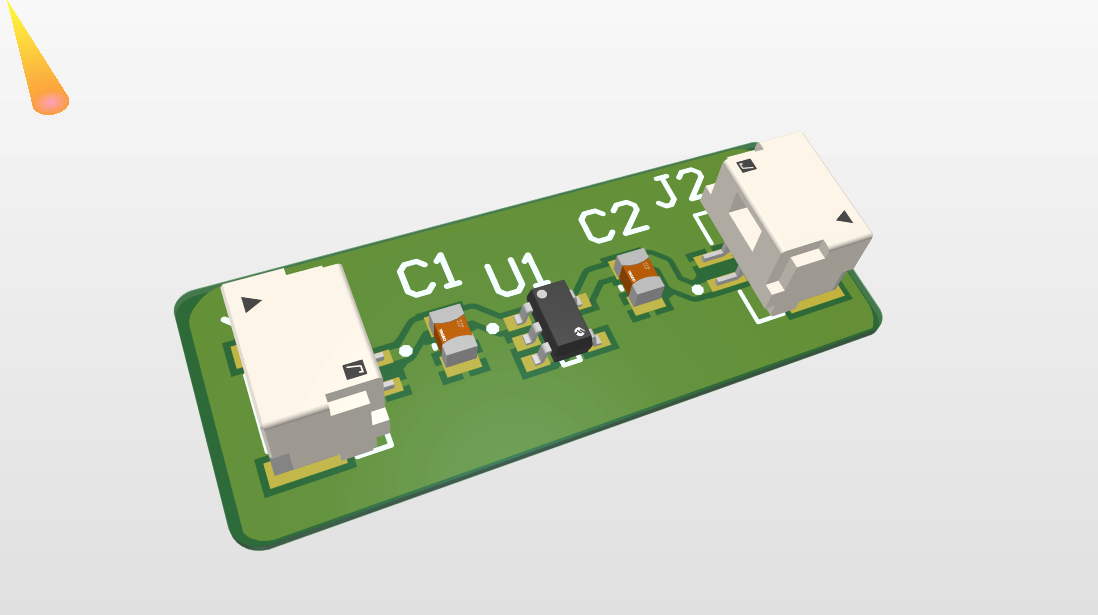
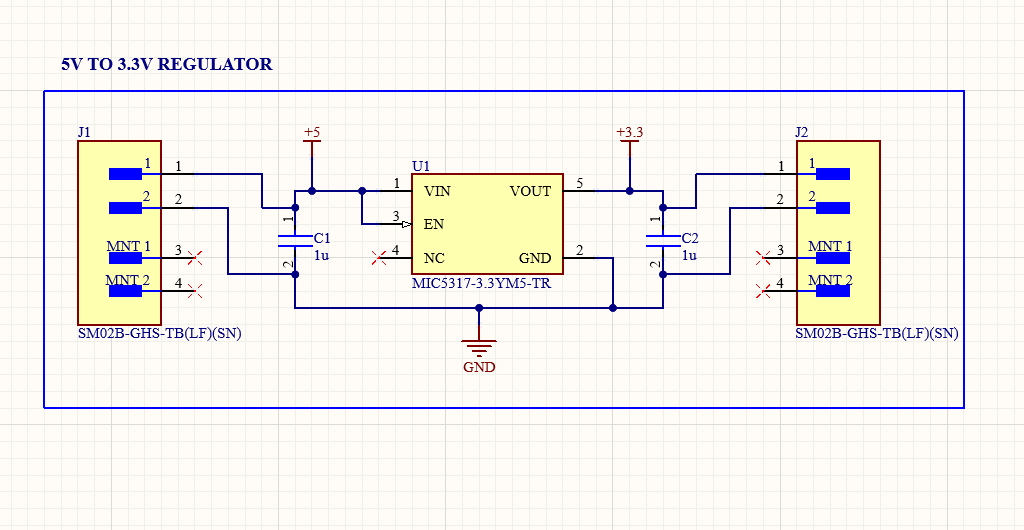
5V to 3.3V LDO Regulator Module
2025 | Skill Transfer (KiCad to Altium)
This project represents a strategic expansion of my PCB design capabilities from KiCad to the industry-standard Altium Designer. I designed a compact, low-noise linear regulator module to power 3.3V logic circuits from standard 5V sources.
The focus was on mastering the Altium workflow, including rigorous component library management, precise 3D body alignment, and output job configuration for manufacturing.
Key Engineering Features:
- Low-Noise Power: Uses MIC5317 LDO with optimized capacitor placement for stability.
- Compact Layout: High-density component placement with robust JST-GH connectors.
- 3D Integration: Full 3D modeling of all components for mechanical clearance verification.
Technologies Used:
2024 Projects
.jpeg)
6-DOF Robotic Arm with Mobile App Control
2024 | Completed
This advanced robotic arm system features wireless control via a custom mobile application using Bluetooth connectivity. The project integrates computer vision for object recognition and automated pick-and-place operations, demonstrating expertise in robotics, automation, and embedded systems.
Key Features:
- Six degrees of freedom for complex movements
- Mobile app control via Bluetooth
- Wireless remote control
- Computer vision for object recognition
- Automated pick-and-place functionality
- Arduino-based control system
- Custom kinematics algorithms
Implementation Highlights:
Technologies Used:
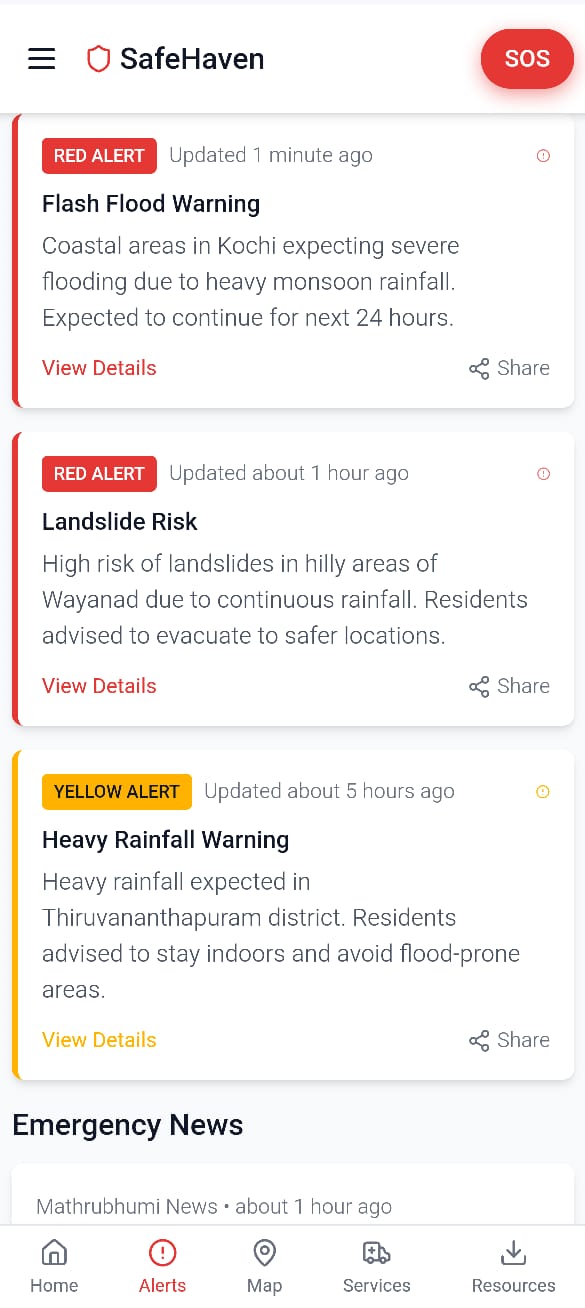
SafeHaven Disaster Management App
2024 | Completed
A comprehensive disaster management application designed to provide real-time emergency information and tools. The app includes features for disaster preparedness, real-time alerts, and emergency response coordination.
Key Features:
- Real-time disaster alerts and news
- Geographical vulnerability prediction
- Offline emergency resources
- SOS functionality with location sharing
- Smartwatch integration
Technologies Used:
Demo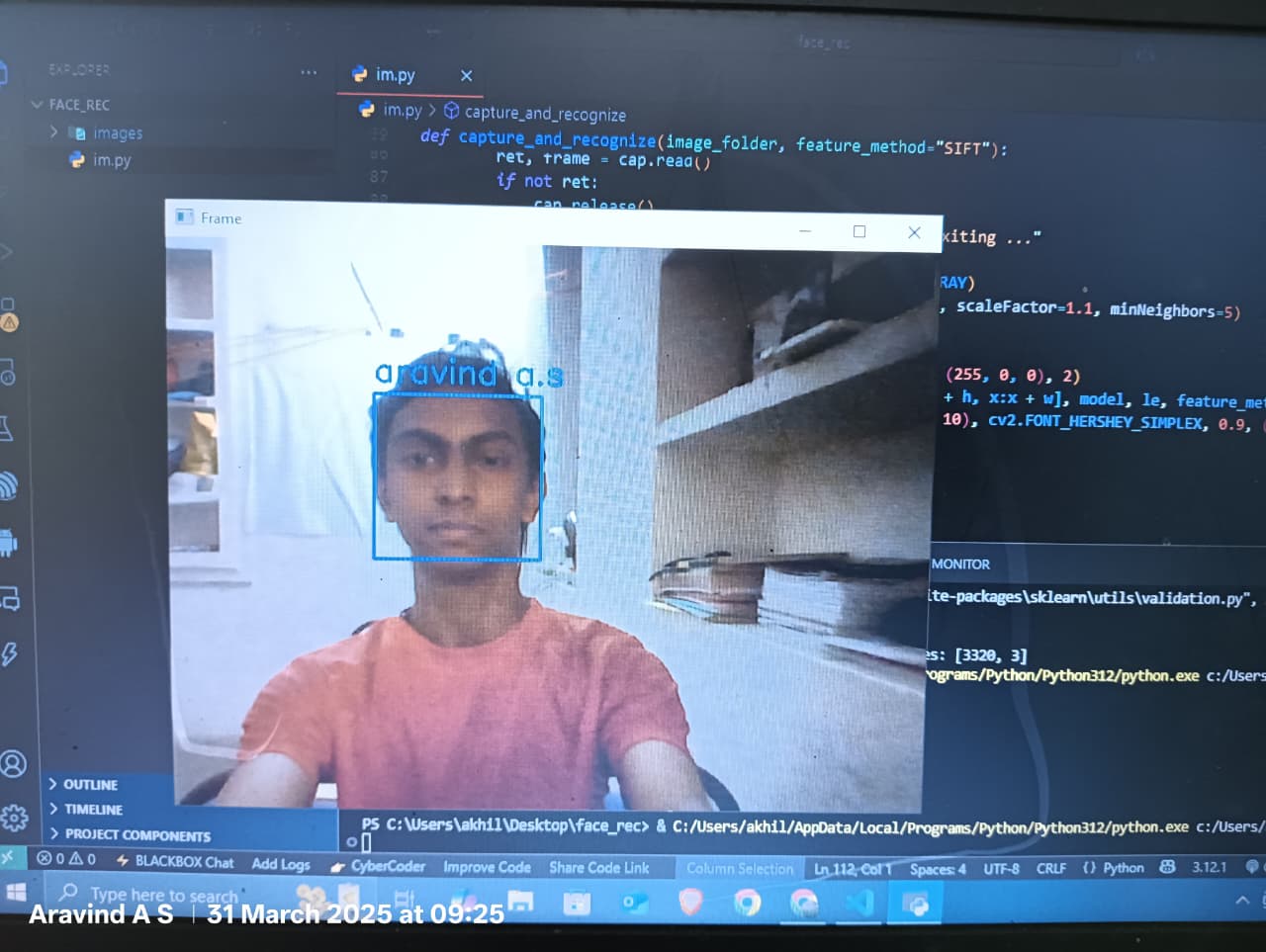
Advanced Face Recognition System
2024 | Completed
A robust face recognition system implemented in Python using OpenCV and machine learning techniques, capable of real-time face detection and identification with high accuracy.
Key Features:
- Real-time face detection and recognition
- Multiple algorithm support (SIFT, ORB, KNN)
- Custom face dataset creation capability
- 95%+ accuracy in controlled conditions
- Webcam and image file input support
Technical Implementation:
Technologies Used:

FPGA-Based BGM Generator (Death Note Theme)
2024 | Completed
This innovative project implements the iconic Death Note anime background music using Verilog HDL on an FPGA board, demonstrating advanced digital design and sound synthesis techniques.
Key Features:
- Pure hardware implementation using Verilog HDL
- Accurate reproduction of Death Note BGM theme
- Custom waveform generation and mixing
- Precise timing control for note durations
- Adjustable tempo and volume control
Technical Implementation:
Technologies Used:

Custom Video Card with EEPROM Storage
2024 | Completed
Designed and implemented a custom video card using logic circuits and EEPROM memory to store and display images on a VGA monitor, demonstrating fundamental digital design principles.
Key Features:
- EEPROM-based image storage (32KB capacity)
- VGA output at 640x480 resolution
- Custom timing circuit for VGA synchronization
- Discrete logic implementation (no microcontroller)
- 8-color display capability
Technical Implementation:
Technologies Used:
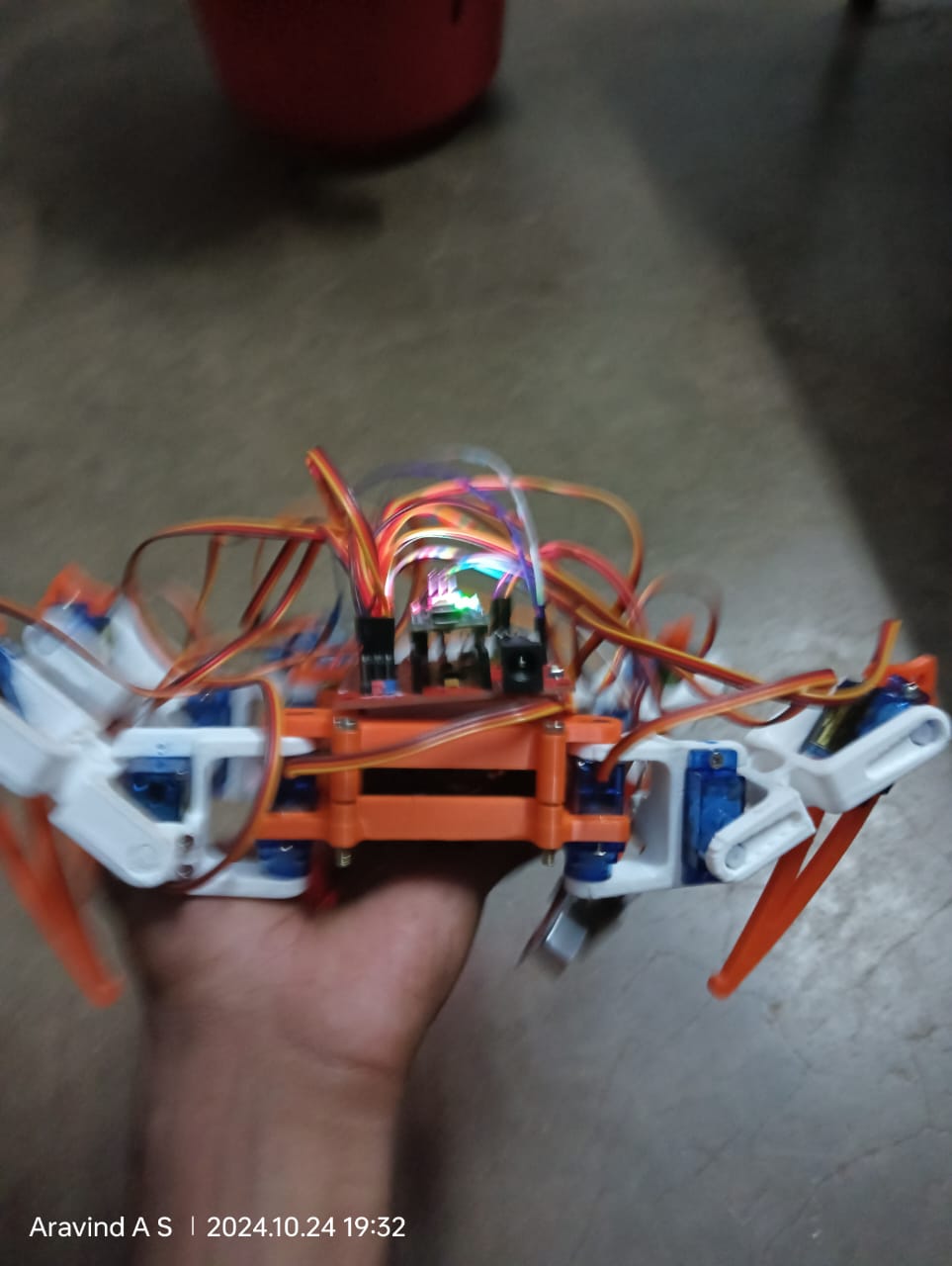
Four-Legged Spider Robot with Arduino Nano
2024 | Completed
An agile quadruped robot inspired by spider locomotion, featuring 8 degrees of freedom and controlled by an Arduino Nano. This project demonstrates advanced servo control and biomimetic movement patterns.
Key Features:
- Biomimetic four-legged design
- Arduino Nano control system
- 24 servo motors for precise movement
- Multiple gait patterns (walk, turn, wave)
- Wireless control via Bluetooth module
Technical Implementation:
Technologies Used:

Arduino-Based EEPROM Data Logger
2024 | Completed
A robust data logging system using EEPROM memory to store sensor readings with timestamp, demonstrating advanced embedded systems techniques for data storage and retrieval.
Key Features:
- 32KB EEPROM storage (28c256)
- Real-time timestamp recording
- Supports multiple sensor inputs
- Low-power operation mode
- Data export via serial interface
Technical Implementation:
Technologies Used:
2023 Projects

High-Fidelity Audio Amplifier
2023 | Completed
Designed and implemented a compact, efficient audio amplifier system using specialized amplifier modules, delivering clear and powerful sound reproduction with minimal distortion.
Key Features:
- 20W RMS power output
- Customizable gain control
- Efficient power management
- Low THD (Total Harmonic Distortion)
- Multiple input options